Well on the physical front things aren’t so good. I have had chronic back issues (muscle spasms) ever since 7th grade (maybe even before) where I am somewhat debilitated and unable to stand. Yesterday I woke and was not able to stand up without a lot of pain. It’s hard to concentrate when you have a constant pain in your lower back so I stayed home from work.
On the robotic front I made huge strides. The spasms are weird in that the come and go in spurts (Ibuprofen helps to relax the muscles). When I felt a relaxation I went into my computer room to work on playing with AVRLib. Specifically, I wired up serial communication to a serial LCD and servo control.
Serial LCD:
This was cake to wire as the MAVRIC has screw headers from the Maxim 232 chip. The serial LCD from http://www.crystalfontz.com/ can take level shifted 232 or TTL 232. So I enabled the onboard RS232 pullups (via the dip switches) and gave it a try. It worked, but needed some tweaking to allow the LCD to init before sending any text. It would be nice to have a bigger LCD (4 line, 20 chars but anything is better than nothing).
Servos:
Now this was a PITA. Long story short, I already knew to change timer.h to timer128.h to accommodate the Mega128 device. However, I also had to modify the makefile to do the same thing. I had a 3 hour debug session wherein I dragged out my O-scope to watch the pin transition. After I got one working, adding more was cake. The AVRLib allows you to control up to 8 (any port, any pin) servos simultaneously by using the 16-bit timer/counter. Seemed a bit jerky, but that’s probably due to my adding printf statement to show the position of the servo before updating it to the next value.
I also made a mounting board for the LCD, MAVRIC, and servos. What I’ve learned thus far is I need to add two toggle switches. One for the power to the MAVRIC as there is no reset switch and 1 for the servo power. Come to think of it adding 1 more for the drive motors would be a good idea too.
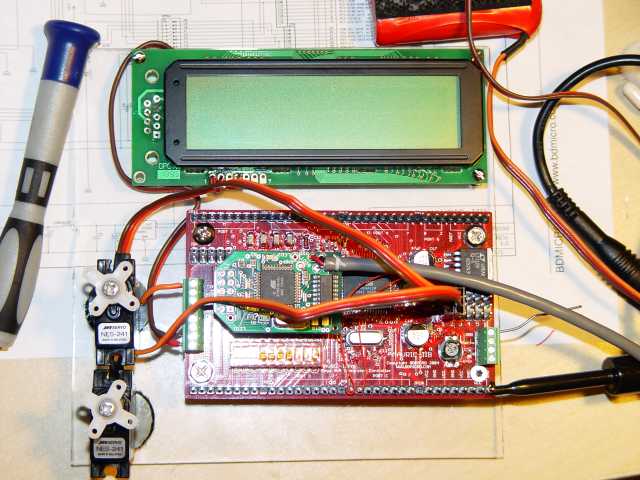
You can see the MAVRIC, serial LCD, two micro servos,
my wire wrapping connections for the servos, oneof
Onward,
Jay